Virtual Reality: Mit dem Holodeck auf Tuchfühlung

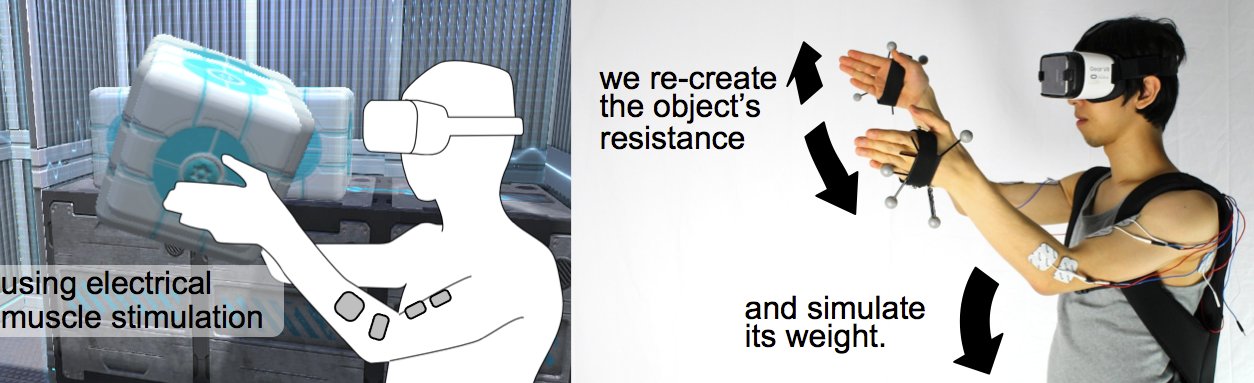
Ein Forscherteam des Hasso-Plattner-Instituts in Potsdam hat ein Projekt vorgestellt, das es ermöglicht, virtuelle Objekte wie Kisten oder Wände haptisch zu erfahren – alles ohne Controller. Sie machen sich dabei Erkenntnisse aus der Rehabilitationsmedizin zur elektrischen Stimulation von Muskeln (EMS) zunutze.
Noch hat die Menschheit weder die Technologie noch die Energiequelle, um wie auf dem Holodeck der Enterprise ganze virtuelle Welten aus purer Energie zu materialisieren. VR-Brillen und -Headsets geben aber schon einen ersten audiovisuellen Vorgeschmack. Controller helfen bei der Interaktion, und ihre Handhabung ist mal mehr, mal weniger immersiv. So stellte die Einführung von Oculus Touch für Besitzer der Rift einen gefühlten Quantensprung dar. Dank der physischen Präsenz des Controllers und einer Reihe von Handbewegungen wie das Drücken eines Abzugs oder das Greifen mit Daumen und Zeigefinger ist die Interaktion mit virtuellen Gegenständen überzeugend. Die virtuelle Realität beginnt allerdings zu wackeln, sobald es schwere Gegenstände wie Kisten sind, auf die der Nutzer stößt. Denn diese lassen sich mit der gleichen Leichtigkeit hochheben wie ein virtueller Pinsel, ein Messer oder eine Pistole. Bei Wänden zerplatzt die Blase schließlich, da sie keinerlei Widerstand bieten und der Nutzer einfach durch sie hindurchgehen kann – schlimmstenfalls begleitet von hässlichem Clipping.
Erkenntnisse aus der Reha-Medizin
Das Potsdamer Team nahm sich genau dieses, die Immersion störenden Problems an. Ein tragbarer, batteriebetriebener EMS-Apparat aus der Rehabilitationsmedizin stimulierte Muskelpaare so, dass dem Nutzer der Eindruck vermittelt wurde, er wäre auf eine Wand gestoßen oder ein schweres Gewicht würde auf ihn drücken, dem er aktiv entgegenwirken muss.
-
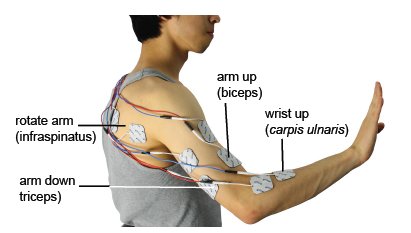 Platzierung der Elektroden zur Muskelstimulation (Bild: plopes.org)
Platzierung der Elektroden zur Muskelstimulation (Bild: plopes.org)
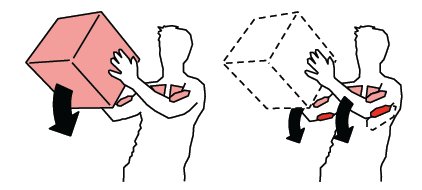
Testkandidaten wurden bis zu acht Elektroden an Handgelenk, Bizeps, Trizeps und Schultermuskulatur angebracht, die mit dem EM-Stimulator verbunden waren. Diese Muskelgruppen kommen bei allen Arm- und Handbewegungen zum Einsatz. Die ausgeführte Bewegung definiert dabei den Grad an Beteiligung der einzelnen Muskeln. Das Heben einer Kiste beispielsweise involviert vor allem Brustmuskulatur und Bizeps, das Drücken eines Knopfes an einer Wand stattdessen Trizeps und Unterarm. Möchte der Nutzer nun die virtuelle Kiste heben, werden die Gegenspieler von Bizeps und Brustmuskeln, Trizeps und Schultermuskulatur, stimuliert. Dadurch bekommt der Nutzer das Gefühl, dass ein schweres Objekt auf ihn einwirkt, das er durch den Einsatz von Bizeps und Brustmuskulatur heben muss.


Der Erfolg der für den Versuch entworfenen virtuellen Erfahrungen war von vier Kriterien abhängig:
- Glaubwürdigkeit: Nutzer mussten überzeugt sein, dass das virtuelle Objekt Auslöser der haptischen Erfahrung war.
- Undurchdringlichkeit: Nutzer durften nicht durch Objekte hindurchgreifen können.
- Einheitlichkeit: Das Gesehene musste zum Gefühlten passen.
- Vertrautheit: Die virtuelle Erfahrung sollte ähnlichen Erfahrungen in der realen Welt entsprechen.
Harte Oberflächen schwer zu simulieren
Zunächst erstellten die Forscher zwei verschiedene Designs: eines für weiche, nachgiebige Oberflächen (Soft-Design), eines für harte Oberflächen. Sie nahmen an, dass ein lang anhaltender intensiver Stimulus eine harte Oberfläche oder ein schweres Gewicht simulieren würde. Schnell entpuppte sich diese Annahme als falsch, da lang anhaltende EMS-Signale die Aufmerksamkeit des Nutzers auf den angeregten Muskel lenkten. Für den außenstehenden Beobachter sah beispielsweise das Abstoßen von einer Wand korrekt aus. Der Nutzer hingegen hatte das Gefühl, sein Arm würde nach hinten gezogen.

Visuelle Effekte begleiten haptische Erfahrung
Daraufhin wurde das Design für harte Oberflächen abgeändert in ein zurückstoßendes oder Repulsionsdesign, das den Muskeln einen intensiven, aber kurzen Stimulus versetzt. Begleitet wurde das Repulsionsdesign durch Blitzeffekte und Knallgeräusche, die die Assoziation mit Elektrizität wecken sollten. Beim Design für weiche Oberflächen wurde stattdessen eine Art Magnetfeld visualisiert, das eine bedingte Durchlässigkeit suggerierte. In einem anschließenden Testparcours ging es zunächst nur darum, herauszufinden, welche Oberflächen glaubhaft zum Soft- oder zum Repulsionsdesign passten. Testkandidaten mussten dabei fünf verschiedene virtuelle Wände berühren. Neben einer Elektrowand für das Repulsionsdesign und einer Magnetfeldwand für das Soft-Design gab es noch drei verschiedene Holzwände:
- Holzwand 1 entsprach dem Design für weiche Oberflächen, ohne aber optisch vom Magnetfeld-Effekt unterstützt zu werden.
- Holzwand 2 besaß ebenfalls das Soft-Design. Zusätzlich kamen noch Force-Feedback-Module zum Einsatz, die am Handgelenk angebracht waren.
- Holzwand 3 sollte keinerlei EMS-Signale auslösen, sondern nur die Force-Feedback-Module aktivieren.

Die Elektrowand wirkte bei allen Testkandidaten am überzeugendsten, gefolgt von der Magnetfeldwand. Holzwand 1, die zusätzlich zum Soft-Design durch Force Feedback unterstützt wurde, lag gleichauf mit Holzwand 2. Die dritte Holzwand war schließlich die am wenigsten überzeugende. Die Forscher schlossen daraus, dass Vibrations-Effekte keinen nennenswerten Vorteil brachten. Beim nächsten Test kamen sie daher nicht mehr zum Einsatz.
Repulsionsdesign mit Elektro-Effekt am überzeugendsten
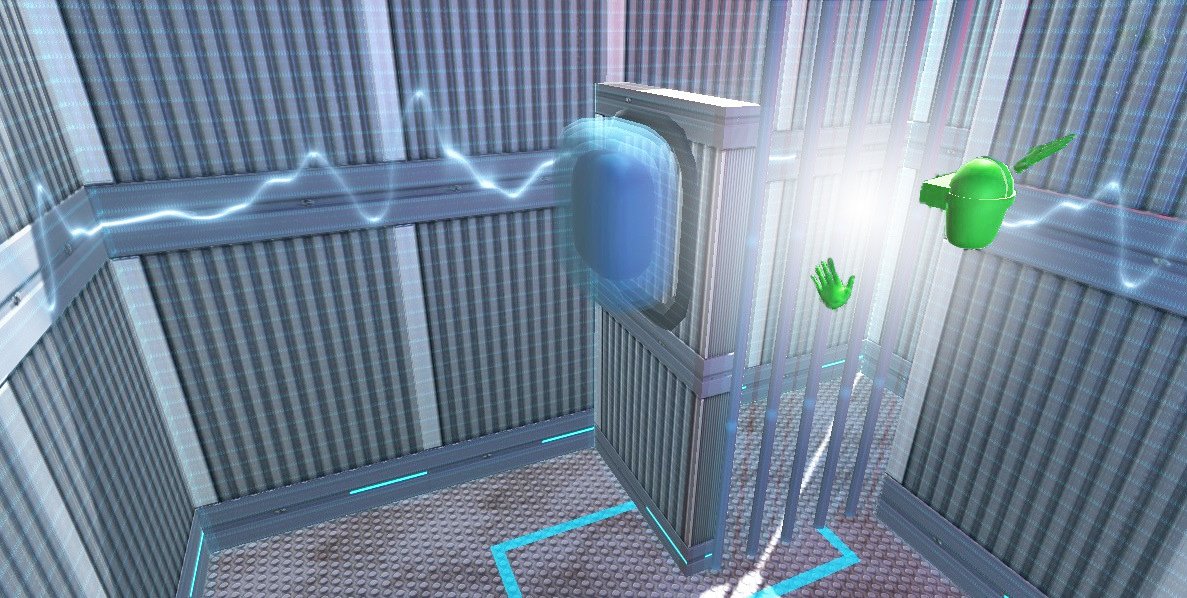
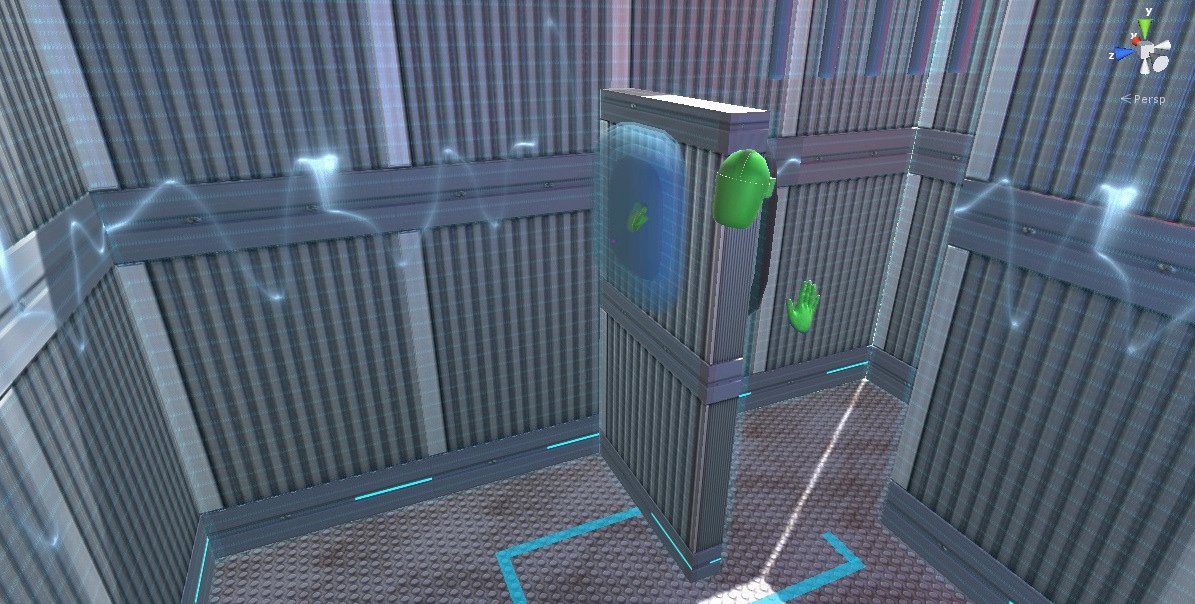
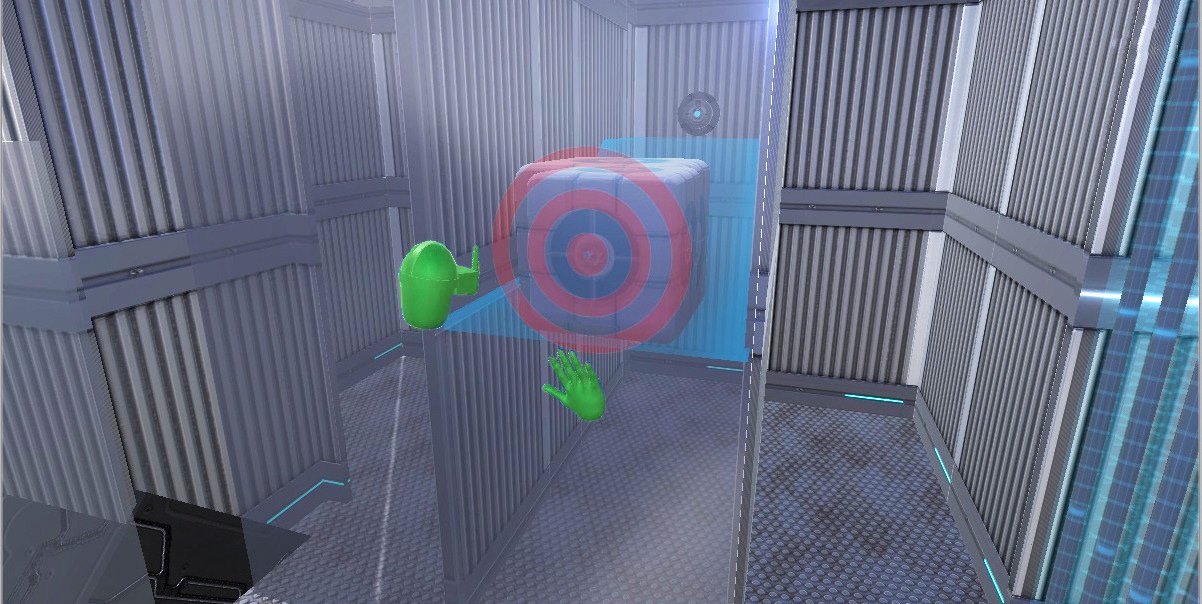
Der zweite Testparcours erinnerte an ein futuristisches Gefängnis mit unter Strom stehenden Wänden und Räumen, in denen jeweils verschiedene Versuchsaufbauten waren. Zunächst sollten die Testkandidaten im direkten Vergleich in zwei Räumen die Unterschiede der virtuellen Erfahrung einmal mit aktiviertem und einmal mit deaktiviertem EMS-System testen. Im ersten Raum war die Aufgabe schlicht, die elektrifizierte Wand zu berühren. im zweiten Raum, Quader und Kisten hochzuheben und zu verrücken. Alle Kandidaten empfanden den Durchlauf mit aktiviertem EMS-System unterhaltsamer und realistischer. Insbesondere die elektrifizierte Wand war bei allen Teilnehmern am beliebtesten. Dies stand im völligen Gegensatz zum Ergebnis mit deaktiviertem EMS-System. Hier war die Wand das Schlusslicht.
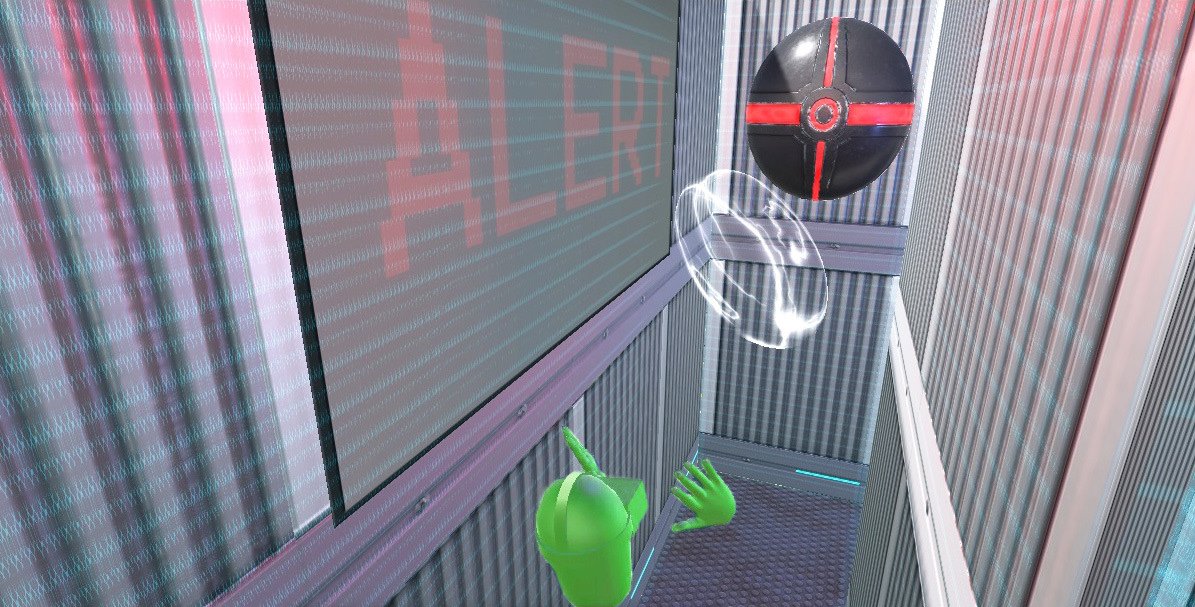
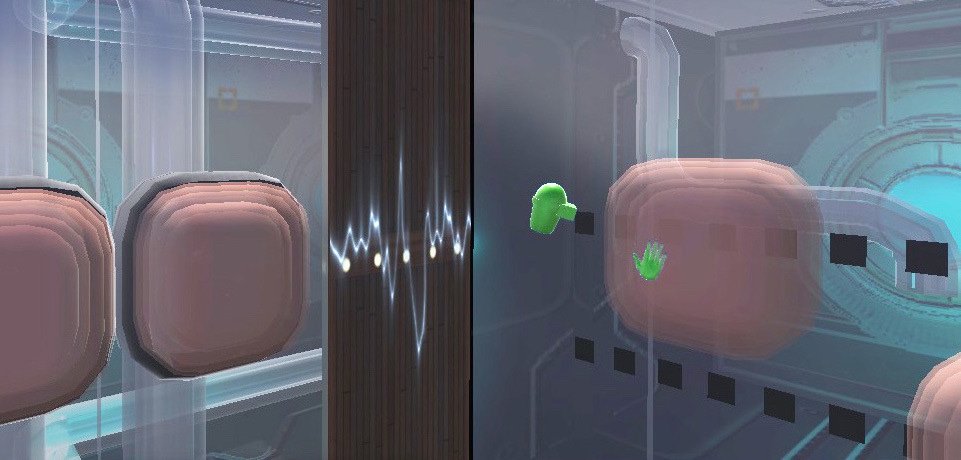
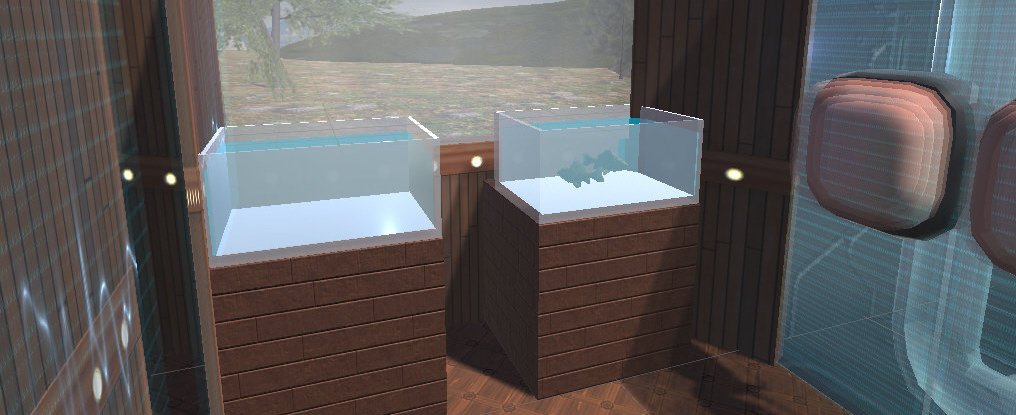
Anschließend konnten sich die Testkandidaten frei in dem Parcours bewegen. Sie konnten Türen auf virtuellen Knopfdruck öffnen, Kisten nicht nur hochheben und verrücken, sondern auch werfen und per Faustschlag verrücken. Projektile, die durch eine Alarmanlage verschossen wurden, sollten mit den Händen abgewehrt werden. Dabei spürten die Nutzer deutlich das Auftreffen der Projektile, die durch das Repulsionsdesign verursacht wurden. In einer anderen Zelle befanden sich zwei Aquarien. Steckte ein Nutzer seine Hände in das Wasser, sorgte das Soft-Design dafür, dass der Nutzer die Bewegung des Wassers spüren konnte.
-
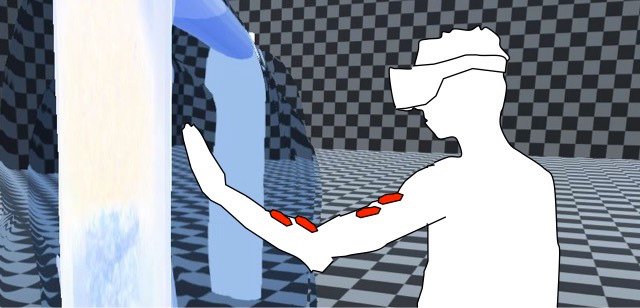
 Unter Strom stehende Wände in der virtuellen Zelle (Bild: plopes.org)
Unter Strom stehende Wände in der virtuellen Zelle (Bild: plopes.org)


Bei der abschließenden Befragung der Teilnehmer fand das EMS-System großen Anklang. Während die einzelnen Effekte und Tests als unterschiedlich wirklichkeitsnah eingestuft wurden, wurden sie durchweg als glaubwürdiger eingeschätzt als ihre EMS-losen Gegenstücke. Das Greifen von Objekten war ohne EMS teils unmöglich, da die Hände auf keinen Widerstand stießen und sich schließlich berührten. Einige Teilnehmer empfanden Schlagbewegungen als unrealistisch, da zwar die Arme einen Aufprall spüren würden, nicht aber Hände. Insgesamt bewertet das Forscherteam die Versuchsreihe positiv. Es erhofft sich, einen neuen Ansatz bei der Simulation von schweren Gegenständen, festen Oberflächen und responsiven Elementen in virtuellen Umgebungen aufgezeigt zu haben.
Das Paper zum Versuchsaufbau ist auf der Projektseite frei verfügbar und beinhaltet auch eine Anleitung zum Nachbau. Neben dem eingangs erwähnten EMS-Apparat wurde ein GearVR-Headset verwendet. Als Tracking-System kamen acht Prime-Kameras von Omnitrack zum Einsatz. Das System soll aber auch zum Tracking-System der HTC Vive kompatibel sein. Die virtuelle Umgebung schließlich wurde in Unity 3D implementiert.
Dieser Artikel war interessant, hilfreich oder beides? Die Redaktion freut sich über jede Unterstützung durch ComputerBase Pro und deaktivierte Werbeblocker. Mehr zum Thema Anzeigen auf ComputerBase.
